Parameter estimation using nonlinear-monotone data
In this notebook we illustrate how to use nonlinear-monotone data for parameter optimization in pyPESTO. An example model is provided in pypesto/doc/example/example_censored
We define a dataset of nonlinear-monotone data as \(\{\widetilde{z}_k\}_{k=1}^N\) such that there exists a monotone (often unknown exactly) function \(f\) which defines the relationship of the data and the model output:
Where:
\(\{y_k\}_{k=1}^N\) is the model output at timepoints \(\{t_k\}_{k=1}^N\),
\(\{\varepsilon_k\}_{k=1}^N\) is the measurement noise (usually normally distributed),
and \(\theta\) is the vector of model (unknown) dynamical parameters.
This type of data can, for instance, be a result of Förster resonance energy transfer (FRET) measurements or saturated Western blots.
In pyPESTO, we have implemented an alogorithm which constructs and optimizes a spline approximation \(s(y, \xi)\) (to be exact a piecewise linear function) of the nonlinear-monotone function \(f(y_k(t_k, \theta), \theta)\).
Using this spline appoximation of the function \(f\) we can then obtain spline-mapped simulations \(\{z_k = s(y_k, \xi)\}_{k=1}^N\) which we can use to define a negative log-likelihood objective function. Finally, the objective function is optimized hierarchically to obtain all model parameters:
The dynamical parameters \(\theta\) are optimized in the outer hierarchical loop,
The spline parameters \(\xi\) are optimized in the inner loop for each iteration of the outer one.
In the following we will demonstrate how to use the spline approximation approach for integration of nonlinear-monotone data.
Problem specification & importing model from the petab_problem
[13]:
import matplotlib.pyplot as plt
import numpy as np
import petab
import pypesto
import pypesto.logging
import pypesto.optimize as optimize
import pypesto.petab
from pypesto.C import LIN, InnerParameterType
from pypesto.hierarchical.spline_approximation import (
SplineInnerProblem,
SplineInnerSolver,
)
from pypesto.hierarchical.spline_approximation.parameter import (
SplineInnerParameter,
)
from pypesto.visualize import (
plot_splines_from_inner_result,
plot_splines_from_pypesto_result,
)
from pypesto.visualize.model_fit import visualize_optimized_model_fit
To specify usage of nonlinear-monotone data, nonlinear_monotone=True has to be passed to the constructor of the PetabImporter. Additionally, as the spline approach is implemented in the hierarchical manner, it requires us to specify hierarchical=True:
[14]:
petab_folder = './example_nonlinear_monotone/'
yaml_file = 'example_nonlinear_monotone.yaml'
petab_problem = petab.Problem.from_yaml(petab_folder + yaml_file)
importer = pypesto.petab.PetabImporter(petab_problem, hierarchical=True)
The petab_problem has to be specified in the usual PEtab formulation. The nonlinear-monotone measurements have to be specified in the measurement.tsv file by adding nonlinear_monotone in the new measurementType column:
[15]:
from pandas import option_context
with option_context('display.max_colwidth', 400):
display(petab_problem.measurement_df)
| observableId | preequilibrationConditionId | simulationConditionId | measurement | time | observableParameters | noiseParameters | observableTransformation | noiseDistribution | measurementType | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | Activity | NaN | Inhibitor_0 | 7.682403 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 1 | Activity | NaN | Inhibitor_3 | 7.876107 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 2 | Activity | NaN | Inhibitor_10 | 8.314587 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 3 | Activity | NaN | Inhibitor_25 | 9.130915 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 4 | Activity | NaN | Inhibitor_35 | 8.078494 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 5 | Activity | NaN | Inhibitor_50 | 5.452116 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 6 | Activity | NaN | Inhibitor_75 | 2.698746 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 7 | Activity | NaN | Inhibitor_100 | 1.673154 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 8 | Activity | NaN | Inhibitor_300 | 0.392886 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 9 | Ybar | NaN | Inhibitor_0 | 0.000000 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 10 | Ybar | NaN | Inhibitor_3 | 0.744411 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 11 | Ybar | NaN | Inhibitor_10 | 2.310524 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 12 | Ybar | NaN | Inhibitor_25 | 4.238056 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 13 | Ybar | NaN | Inhibitor_35 | 4.642859 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 14 | Ybar | NaN | Inhibitor_50 | 4.832879 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 15 | Ybar | NaN | Inhibitor_75 | 4.898684 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 16 | Ybar | NaN | Inhibitor_100 | 4.913791 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
| 17 | Ybar | NaN | Inhibitor_300 | 4.929008 | 5 | NaN | 1 | lin | normal | nonlinear_monotone |
To estimate the noise parameters of the nonlinear-monotone observables, those noise parameters in the parameter.tsv file have to have column entries estimate with value 1 and column entry parameterType with value sigma, as in case of using relative data:
[16]:
import pandas as pd
noise_parameter_file = 'parameters_example_nonlinear_monotone_noise.tsv'
# load the csv file
noise_parameter_df = pd.read_csv(petab_folder + noise_parameter_file, sep='\t')
with option_context('display.max_colwidth', 400):
display(noise_parameter_df)
| parameterId | parameterName | parameterScale | lowerBound | upperBound | nominalValue | estimate | parameterType | |
|---|---|---|---|---|---|---|---|---|
| 0 | K1 | K1 | lin | -5.00000 | 5.0 | 0.04 | 0 | NaN |
| 1 | K2 | K2 | lin | -5.00000 | 5.0 | 20.00 | 0 | NaN |
| 2 | K3 | K3 | log10 | 0.10000 | 100000.0 | 4000.00 | 1 | NaN |
| 3 | K5 | K5 | log10 | 0.00001 | 100000.0 | 0.10 | 1 | NaN |
| 4 | sd_Activity | \sigma_{activity} | lin | 0.00000 | inf | 1.00 | 1 | sigma |
| 5 | sd_Ybar | \sigma_{ybar} | lin | 0.00000 | inf | 1.00 | 1 | sigma |
Note on inclusion of additional data types:
It is possible to include observables with different types of data to the same petab_problem. Refer to the notebooks on using ordinal data and censored data for details on integration of other data types. If the measurementType column is left empty for all measurements of an observable, the observable will be treated as quantitative.
Constructing the objective and pypesto problem
Different options can be used for the spline approximations:
spline_ratio: float value, determines the number of spline knots asn_spline_pars=spline_ratio*n_datapointsmin_diff_factor: float value, determines the minimal difference between consecutive spline heights asmin_diff_factor*measurement_range/n_spline_pars. Set it to 0.0 to disable.
The min_diff_factor is a multiplier of the minimal difference between spline heights. Positive values act as a penalty in the objective function for incorrect orderings; this penalty can improve convergence for most models. However, high min_diff_factor values will reduce the spline’s ability to approximate functions with flat regions accurately. This issue will be demonstrated in the last section.
Now when we construct the objective, it will construct all objects of the optimal scaling inner optimization:
SplineInnerSolverSplineAmiciCalculatorSplineInnerProblem
Specifically, the SplineInnerSolver and SplineInnerProblem will be constructed with default settings of
spline_ratio= 1/2use_minimal_difference= 1/2
[17]:
objective = importer.create_objective()
To give non-default options to the OptimalScalingInnerSolver and OptimalScalingProblem, one can pass them as arguments when constructing the objective:
[18]:
objective = importer.create_objective(
inner_options={
"spline_ratio": 1 / 2,
"min_diff_factor": 1 / 2,
},
)
Alternatively, one can even pass them to the importer constructor pypesto.petab.PetabImporter().
If changing the spline_ratio setting, one has to create the objective object again, as this requires a constuction of the new SplineInnerProblem object with the requested amount of inner parameters.
Now let’s construct the pyPESTO problem and optimizer. We’re going to use a gradient-based optimizer for a faster optimization, but gradient-free optimizers can be used in the same way:
[19]:
problem = importer.create_problem(objective)
engine = pypesto.engine.SingleCoreEngine()
optimizer = optimize.ScipyOptimizer(
method="L-BFGS-B",
options={"disp": None, "ftol": 2.220446049250313e-09, "gtol": 1e-5},
)
n_starts = 10
Running optimization using spline approximation
Now running optimization is as simple as running usual pyPESTO miminization:
[20]:
np.random.seed(n_starts)
result = optimize.minimize(
problem, n_starts=n_starts, optimizer=optimizer, engine=engine
)
100%|██████████| 10/10 [00:13<00:00, 1.35s/it]
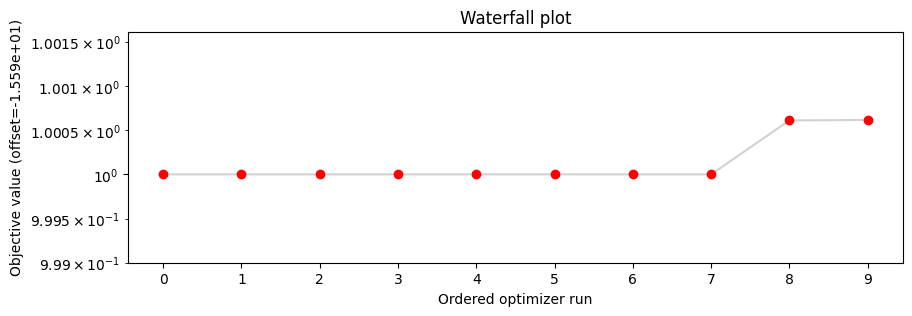
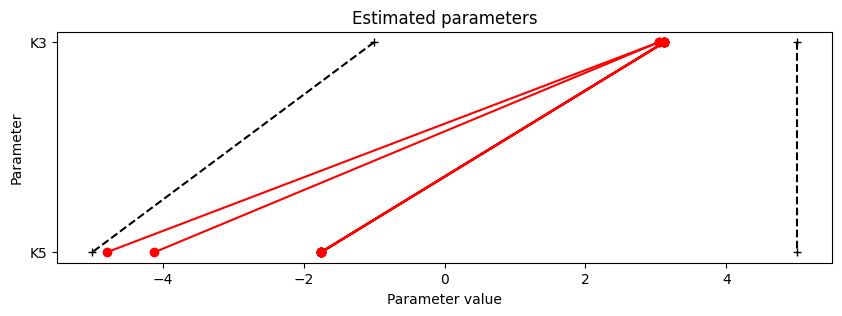
The model optimization has good convergence with a plateu at the optimal point:
[21]:
from pypesto.visualize import parameters, waterfall
waterfall([result], size=(10, 3))
plt.show()
parameters([result], size=(10, 3))
plt.show()
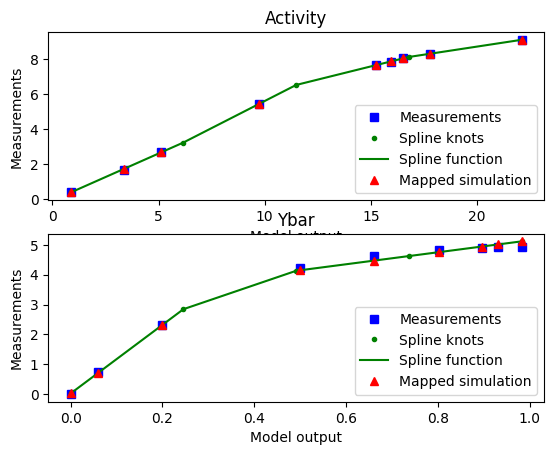
We can plot the optimized spline of the best start using the plot_from_pypesto_result visualization:
[22]:
plot_splines_from_pypesto_result(result)
plt.show()
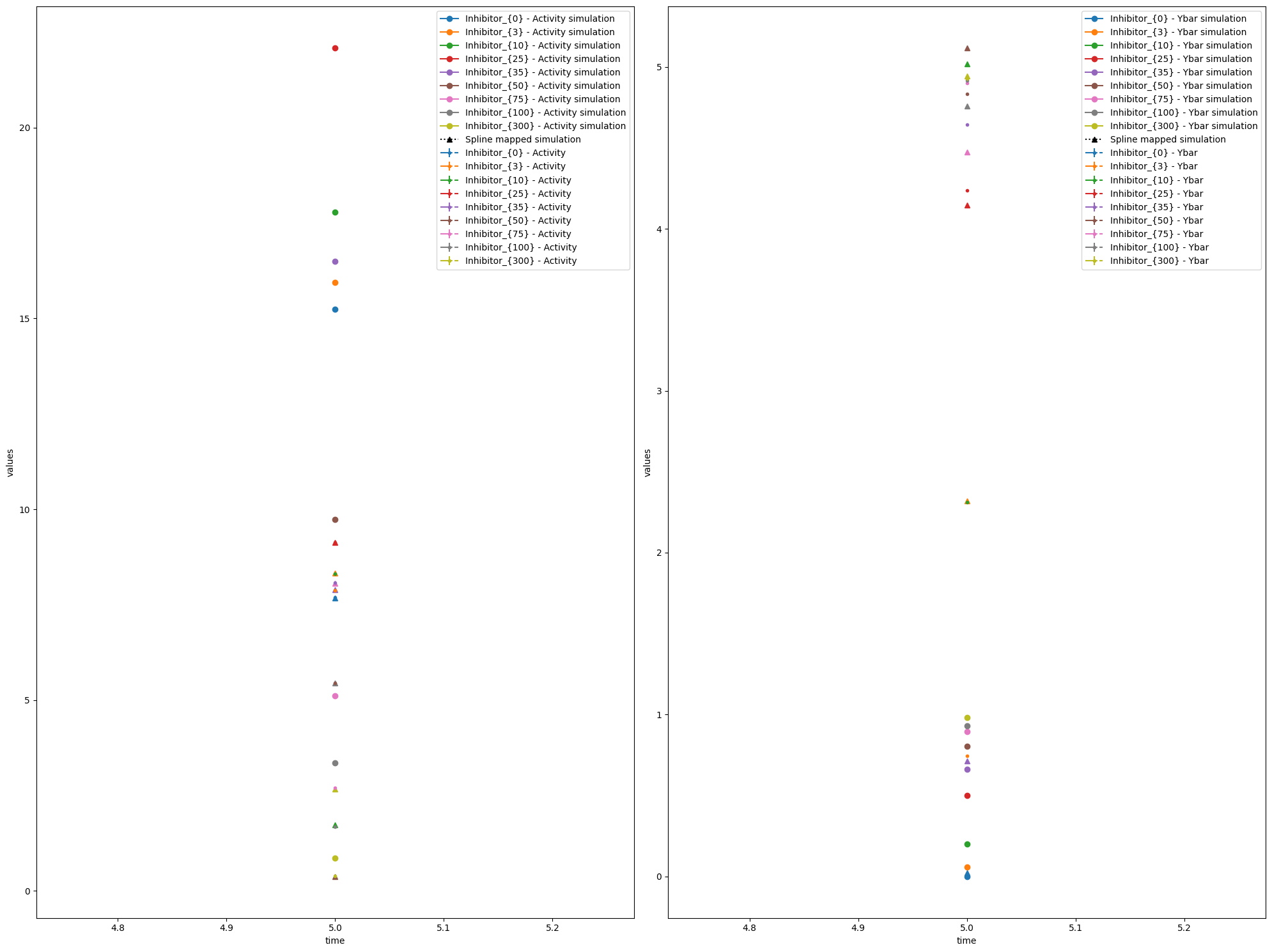
We can also plot the model fit (observable trajectories) with the spline-mapped simulations included using visualize_optimized_model_fit.
[23]:
visualize_optimized_model_fit(
petab_problem,
result,
problem,
)
plt.show()
Caution when using minimal difference
To illustrate that minimal difference sometimes has a negative effect we will apply it to a very simple synthetic “model” – simulation of the exponential function:
[24]:
timepoints = np.linspace(0, 10, 11)
function = np.exp
simulation = timepoints
sigma = np.full(len(timepoints), 1)
# Create synthetic data as the exponential function of timepoints
data = function(timepoints)
spline_ratio = 1 / 2
n_spline_pars = int(np.ceil(spline_ratio * len(timepoints)))
par_type = 'spline'
mask = [np.full(len(simulation), True)]
inner_parameters = [
SplineInnerParameter(
inner_parameter_id=f'{par_type}_{1}_{par_index+1}',
inner_parameter_type=InnerParameterType.SPLINE,
scale=LIN,
lb=-np.inf,
ub=np.inf,
ixs=mask,
index=par_index + 1,
group=1,
observable_id='observable_1',
)
for par_index in range(n_spline_pars)
]
inner_problem = SplineInnerProblem(
xs=inner_parameters, data=[data], spline_ratio=spline_ratio
)
options = {
'minimal_diff_on': {
'min_diff_factor': 1 / 2,
},
'minimal_diff_off': {
'min_diff_factor': 0.0,
},
}
inner_solvers = {}
results = {}
for minimal_diff, option in options.items():
inner_solvers[minimal_diff] = SplineInnerSolver(
options=option,
)
print(f'Using {minimal_diff} options: {option}')
# Solve the inner problem to obtain the optimal spline
results[minimal_diff] = inner_solvers[minimal_diff].solve(
problem=inner_problem,
sim=[simulation],
amici_sigma=[sigma],
)
plot_splines_from_inner_result(inner_problem, results[minimal_diff])
plt.show()
Using minimal_diff_on options: {'min_diff_factor': 0.5}
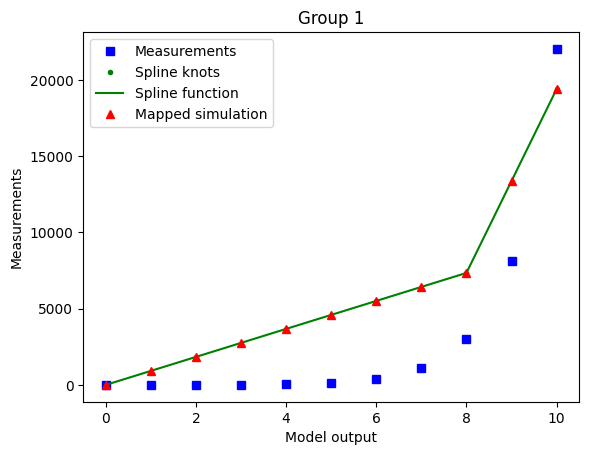
Using minimal_diff_off options: {'min_diff_factor': 0.0}
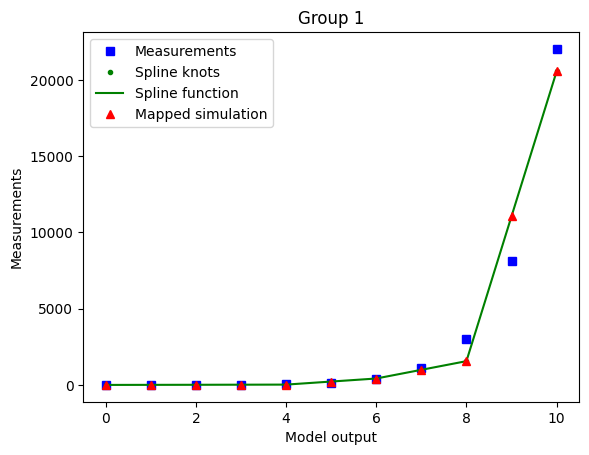
The optimized spline for the case with enabled minimal difference is performing much worse even if we use a non-extreme min_diff_factor value. This is due to the relative flatness of the data with respect to the true model output.
The minimal difference is determined as
so for nonlinear-monotone functions which are relatively flat on some intervals, it is best to keep the minimal difference disabled.
As the true output (e.g. observable simulation of the model with true parameters) is mostly a-priori not known, it’s hard to know whether the minimal difference is going to have a bad or good effect on the optimization. So a good heuristic is to run for different values of min_diff_factor and compare results.